Что такое импеданс?
Джесси
Это представлено как ресурс для сообщества и опыт обучения для себя. У меня достаточно знаний о предмете, чтобы попасть в беду, но я не очень хорошо разбираюсь в деталях предмета. Некоторые полезные ответы могут быть:
- Объяснение составляющих импеданса
- Как эти компоненты взаимодействуют
- Как можно преобразовать импедансы
- Как это относится к ВЧ-фильтрам, блокам питания и прочему...
Спасибо за помощь!
Ответы (5)
Уинделл Оскай
На вопрос «что такое импеданс» я хотел бы отметить, что импеданс — это широкое понятие физики в целом, одним из примеров которого является электрический импеданс.
Чтобы понять, что это значит и как работает, зачастую проще рассмотреть механический импеданс. Подумайте о попытке толкнуть (сдвинуть) тяжелую кушетку по полу.
Вы прикладываете определенное усилие, и кушетка скользит с определенной скоростью, в зависимости от того, насколько сильно вы нажимаете, веса кушетки, типа поверхности пола, типа ножек, которые есть у кушетки, и так далее. Для этой ситуации можно определить механический импеданс, который дает соотношение между тем, насколько сильно вы нажимаете, и тем, как быстро движется кушетка.
На самом деле это очень похоже на электрическую цепь постоянного тока, где вы прикладываете определенное напряжение к цепи, и через нее протекает ток с определенной соответствующей скоростью.
В случае как кушетки, так и цепи ответ на ваш ввод может быть простым и довольно линейным: резистор, который подчиняется закону Ома, где его электрический импеданс равен просто сопротивлению, а кушетка может иметь ножки фрикционных ползунков, которые позволяют ему двигаться со скоростью, пропорциональной вашей силе.*
Цепи и механические системы также могут быть нелинейными. Если ваша схема состоит из переменного напряжения, помещенного на резистор последовательно с диодом, ток будет близок к нулю, пока вы не превысите прямое напряжение диода, после чего ток начнет течь через резистор в соответствии с сопротивлением Ома. закон. Точно так же диван, стоящий на полу, обычно имеет некоторую степень статического трения: он не начнет двигаться, пока вы не нажмете на него с определенной начальной силой. Ни в механической, ни в электрической системе нет единого линейного импеданса, который можно было бы определить. Лучшее, что вы можете сделать, это отдельно определить импедансы для разных условий. (Реальный мир гораздо больше похож на этот.)
Даже когда все очень ясно и линейно, важно отметить, что импеданс просто описывает отношение — он не описывает пределы системы, и это не «плохо». Вы определенно можете получить столько тока/скорости, сколько хотите (в идеальной системе), добавляя больше напряжения/нажимая сильнее.
Механические системы также могут дать довольно хорошее представление об импедансе переменного тока. Представьте, что вы едете на велосипеде. С каждым полупериодом педалей вы нажимаете влево, затем вправо. Вы также можете представить, как крутите педали только одной ногой и туклипсом, чтобы вы нажимали и тянули при каждом цикле педали. Это очень похоже на подачу переменного напряжения в цепь: вы нажимаете и тянете по очереди, циклически, с некоторой заданной частотой.
Если частота достаточно медленная, например, когда вы остановились на велосипеде, проблема нажатия на педали — это просто проблема «постоянного тока», как толкание дивана. Однако, когда вы ускоряетесь, все может действовать по-другому.
Теперь предположим, что вы едете на велосипеде с определенной скоростью, и ваш велосипед трехскоростной с низким, средним и высоким передаточными числами. Средняя кажется естественной, на высокой передаче трудно приложить достаточное усилие, чтобы что-то изменить, а на низкой передаче вы просто крутите педали, не передавая никакой энергии колесам. Это вопрос согласования импеданса , когда вы можете эффективно передавать мощность на колеса только тогда, когда они оказывают определенное физическое сопротивление вашей ноге - не слишком большое и не слишком малое. Соответствующее электрическое явление также очень распространено; вам нужны линии с согласованным импедансом для эффективной передачи радиочастотной мощности из точки А в точку Б, и каждый раз, когда вы соединяете две линии передачи вместе, на интерфейсе будут некоторые потери.
Сопротивление, которое педали оказывают вашим ногам, пропорционально силе нажатия, что наиболее близко к простому сопротивлению, особенно на низких скоростях. Даже в цепях переменного тока резистор ведет себя как резистор (до определенного момента).
Однако, в отличие от резистора, импеданс велосипеда зависит от частоты. Предположим, вы включаете велосипед на высокой передаче, начиная с остановки. Может быть очень трудно начать. Но как только вы начнете, сопротивление педалей будет снижаться по мере того, как вы будете двигаться быстрее, и как только вы начнете двигаться очень быстро, вы можете обнаружить, что сопротивление педалей слишком мало, чтобы поглощать энергию ваших ног. Таким образом, на самом деле существует частотно-зависимый импеданс ( реактивное сопротивление ), который начинается с высокого уровня и становится ниже по мере того, как вы приближаетесь к более высокой частоте.
Это очень похоже на поведение конденсатора, и довольно хорошей моделью механического импеданса велосипеда будет резистор, подключенный параллельно конденсатору.
При постоянном токе (нулевой скорости) вы просто видите высокое постоянное сопротивление в качестве импеданса. По мере увеличения частоты педалирования импеданс конденсатора становится ниже, чем у резистора, и позволяет току течь таким образом.
Существуют, конечно, различные другие электрические компоненты и их механические аналоги**, но это обсуждение должно дать вам некоторую начальную интуицию в отношении общей концепции, чтобы оставаться на земле (каламбур), когда вы изучаете математические аспекты того, что иногда может показаться как очень абстрактный предмет.
* Слово для придирчивых: закон Ома никогда не бывает точным для реального устройства, а силы трения в реальном мире никогда не дают скорости, точно пропорциональной силе. Однако «довольно линейно» легко. Я пытаюсь быть образовательным и все такое здесь. Сделай мне слабину.
**Например, индуктор — это что-то вроде подпружиненного ролика на вашем колесе, который увеличивает сопротивление при переходе на более высокую частоту.)
пинг
Импеданс элемента цепи представляет собой отношение между напряжением и током в этом элементе.
Постоянные напряжения и токи
Для постоянных напряжений и токов импеданс — это просто сопротивление. Резистор — это устройство, которое поддерживает одинаковое отношение напряжения к току даже при изменении напряжения. Они линейны - удваивает напряжение и удваивает ток. Если бы вы нарисовали график зависимости напряжения от силы тока, наклон был бы импедансом.
Конденсатор, похожий на две металлические пластины, действует как разомкнутая цепь для постоянных токов и напряжений. Катушка индуктивности, то есть витая проволока, действует как короткое замыкание для постоянных токов и напряжений.
(На самом деле все не так чисто. Резисторы, как правило, пропускают меньший ток, чем должны, когда нагреваются. Конденсаторы пропускают немного тока, даже если не должны. Катушки индуктивности имеют небольшое сопротивление, как обычный провод)
Напряжения и токи, изменяющиеся со временем
Вот где это становится более интересным. Некоторые элементы схемы, такие как конденсаторы и катушки индуктивности, пропускают больший или меньший ток в зависимости от частоты напряжения, которому они подвергаются. Вы можете думать о них как о частотно-зависимых резисторах. Зависящая от частоты часть импеданса называется реактивным сопротивлением. Добавьте реактивное сопротивление и сопротивление, и вы получите импеданс.
Примеры реактивного сопротивления
Предположим, у вас есть коробка, которая генерирует синусоидальные волны амплитудой 120 В. Вы устанавливаете коробку на 60 циклов в секунду и подключаете сигнал коробки через конденсатор емкостью 0,1 Ф. Текущий ток будет синусоидальной волной той же частоты. Текущий будет:
I = V * 2 * pi * частота * C
I = 120 * 2 * 3,14 * 60 * 0,1 = 4522 ампера.
(На самом деле такой большой ток может привести к взрыву конденсатора.)
Если вы удвоите частоту синусоиды, ток удвоится. Такое поведение полезно в RC-фильтрах — вы можете создавать схемы с высоким сопротивлением на одной частоте и низким сопротивлением на другой, что позволяет, например, выделять сигнал среди шума.
Катушка индуктивности ведет себя аналогично, но при увеличении частоты импеданс увеличивается, а не уменьшается.
Реальный мир
На самом деле все имеет некоторое сопротивление, а также некоторое реактивное сопротивление (либо небольшую емкость, либо индуктивность, но не то и другое одновременно). Кроме того, все схемы имеют нелинейности, такие как зависимость от температуры или геометрические эффекты, которые заставляют их отклоняться от идеальной модели.
Кроме того, напряжения и токи, с которыми мы имеем дело, никогда не бывают идеальными синусоидами — они представляют собой смесь частот.
Например, предположим, что вы используете соленоид, чтобы открыть дверной замок, как зуммер в многоквартирных домах. Соленоид представляет собой массивный индуктор, который создает магнитное поле, оттягивающее защелку против силы пружины. Когда вы отключаете соленоид, вы резко меняете ток со временем. Когда вы пытаетесь заставить ток быстро падать, индуктивность соленоида вызывает быстрый рост напряжения.
Вот почему вы видите так называемый «обратноходовой диод» параллельно с большими катушками индуктивности, чтобы позволить току падать медленнее, избегая всплесков напряжения, вызванных высокочастотными изменениями.
Следующий шаг
Отсюда следующий шаг — научиться моделировать схемы, состоящие из нескольких реактивных элементов (скажем, группы резисторов и конденсаторов). Для этого мы должны отслеживать не только амплитуды напряжения и тока, но и фазовый сдвиг между ними — пики синусоид не совпадают во времени.
(К сожалению, мне нужно поработать здесь, поэтому я оставлю вам эту ссылку: http://www.usna.edu/MathDept/CDP/ComplexNum/Module_6/ComplexPhasors.htm )
эндолит
Импеданс является расширением понятия сопротивления, которое включает в себя влияние емкости и индуктивности. Катушки индуктивности и конденсаторы имеют «реактивное сопротивление», а полное сопротивление представляет собой комбинацию эффектов сопротивления и реактивного сопротивления.
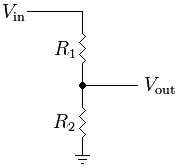
Введение n00b: По сути, он позволяет вам думать о конденсаторах и катушках индуктивности, как если бы они были резисторами, что делает расчеты более простыми и интуитивно понятными. Например, если вы знаете, как рассчитать выходной сигнал чисто резистивного делителя напряжения:
тогда вы также можете рассчитать величину выходного сигнала RC-фильтра на заданной частоте:
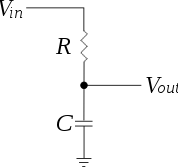
Скажем, R составляет 1 кОм, а C составляет, например, 1 мкФ, и вы хотите знать выходное напряжение, если вы вводите синусоидальную волну с частотой 160 Гц. Реактивное сопротивление конденсатора при 160 Гц имеет величину около 1 кОм , поэтому оба «резистора» одинаковы, и напряжение на каждом будет одинаковым. На каждый компонент приходится 0,707 входного напряжения, а не 0,5, как в резистивном случае.
На других частотах величина реактивного сопротивления конденсатора была бы другой, поэтому фильтр по-разному реагирует на разные частоты. Вы также можете работать с мнимыми числами, чтобы вычислить фазовый сдвиг на выходе, но часто величина — это единственная часть, которая вас волнует.
Кортук
Кортук
Маугли
суперкот
Механическая аналогия импеданса, которая мне нравится, — это вертикально подвешенная пружина с подвешенным на ней набором грузов. Если система изначально неподвижна, а груз наверху резко дернуть вверх, быстро вернув его в исходное положение, возмущение переместится вниз по пружине. Каждая гиря будет тянуться вверх под действием веса, находящегося выше, затем толкать вверх гирю выше (и толкаться ею вниз), в то время как она будет тянуть вверх гирю внизу (и притягиваться ею вниз), и, наконец, толкаться вверх под действием силы тяжести. вес ниже. Как только все это произойдет, вес вернется в исходное положение и (нулевую) скорость.
Обратите внимание, что поведение распространяющейся вниз волны не зависит ни от чего, находящегося под ней. Однако, как только волна достигает дна, может произойти одно из трех событий в зависимости от того, болтается ли конец пружины, жестко ли прикреплен к чему-либо или прикреплен к чему-то, что может двигаться с некоторым сопротивлением.
Если конец пружины болтается, нижний груз не будет иметь под собой ничего, что могло бы тянуть его вниз, когда он дернется вверх. Результатом этого будет то, что вес будет дергаться вверх сильнее, чем в противном случае, и больше, чем вес, находящийся выше, должен компенсировать свою энергию. Это, в свою очередь, заставит вес толкать вверх вес, находящийся выше, и создать волну, бегущую вверх, которая (при отсутствии потерь на трение) будет равна по величине исходной нисходящей волне. Направление смещения будет таким же, как и у исходной волны (т.е. вверх), но напряжение будет противоположным (исходная волна была волной растяжения, отскок будет волной сжатия).
Напротив, если конец пружины зафиксирован, нижний груз обнаружит, что пружина под ним сопротивляется сильнее, чем ожидалось. Таким образом, нижний вес не будет двигаться вверх так сильно, как ожидал вес над ним, и чистый эффект будет таким, как если бы нижний вес дал дополнительный «рывок», посылая волну вверх. Направление смещения этой волны будет противоположно исходной волне (т.е. вниз), но напряжение будет таким же (сжатие).
Если нижняя часть пружины прикреплена к чему-то, что немного двигается, но не так сильно, как болтающаяся пружина, два описанных выше поведения могут до некоторой степени компенсироваться. Если дну пружины будет позволено сместиться на нужную величину, поведение отменится, и волна исчезнет. В противном случае тот или иной тип волны будет отскакивать, но амплитуда, как правило, будет меньше, чем в случае с оборванным или фиксированным концом. Величина требуемого сопротивления фактически определяется импедансом, который, в свою очередь, является функцией массы грузов и жесткости пружин.
Обратите внимание, что эта модель захватывает многие виды поведения, связанные с импедансом. Например, если все гири выше определенной точки весят 100 г, а те, что ниже, весят 200 г, и все пружины одинаковы, переход от более легких гирь к более тяжелым приведет к тому, что часть волновой энергии будет отражаться вверх (таким образом, аналогично фиксированному нижнему концу), так как более тяжелые веса не будут двигаться так сильно, как ожидалось. Ключевое понятие состоит в том, что для вещей, которые вынуждены возвращаться к нулевой скорости, они должны передавать как свою кинетическую энергию, так и свой импульс. Если они смогут передать свою энергию и импульс чему-то с теми же характеристиками, что и то, что толкнуло их, они примут всю энергию и импульс и передадут их дальше. В противном случае им придется отправить обратно часть энергии и/или импульса.
Винтаж
Я ограничу свой ответ электрической сферой. Импеданс (Z) буквально равен V/I. Это так просто. Но «это» не во всех случаях так просто. Давайте начнем с упрощенного и работать вверх.
Если импеданс представляет собой простой резистор с сосредоточенными параметрами, а V представляет собой напряжение постоянного тока (частота = f = 0), мы можем переписать Z=V/I как R=V/I.
Если импеданс возникает из-за колпачка или катушки индуктивности, то импеданс зависит от частоты.
Если частоты становятся достаточно высокими, чтобы компоненты не отображались как сосредоточенные элементы, тогда импеданс зависит не только от частоты, но и от местоположения. Иногда эти элементы предназначены для распространения (например, волноводы, антенны и ЭМ волны в свободном пространстве), а иногда нет.
Общий инструмент, который был разработан для изображения этих высокочастотных эффектов во времени и пространстве (1 измерение), это . . . Z=V/I. Но «V» и «I» — комплексные векторные величины вида (A)(e)^(j(wt+x)), где j=SQRT(-1), «A» — константа, «e ' — основание натурального логарифма, «w» — частота в радианах в секунду, «t» — время в секундах, а «x» — расстояние вдоль одномерного пути. Поскольку «Z» представляет собой отношение этих двух комплексных векторов, он также является комплексным вектором, изменяющимся во времени и пространстве. Инженер-электрик манипулирует этими величинами в течение желаемого времени и места, а затем берет реальную часть V или I (или Z), чтобы получить то, что наблюдается в реальном мире.
Как терминировать линию передачи 50 Ом без рисования постоянного тока
РЧ-приемник, чтобы слышать все несущие сразу? (чтобы услышать электросмог)
Согласование импеданса с L-сетью, вопросы терминологии
"Верхняя связь" в полосовом фильтре УКВ
Как подойти к разработке полосового фильтра 30 ГГц?
Согласование импеданса с тактовой частотой 2 МГц. Кабель длиной 2 м. От печатной платы к печатной плате.
фильтр нижних частот с прямым цифровым синтезом
Микрополосковые и CPWG-переходы на печатной плате
Расчет импеданса трассы в Altium for RF
Теоретическое определение добротности индуктора
Дж. Полфер
Джесси
Бьяркеф
Джесси
Кортук
Джесси
Джесси
пользователь23892