Хорошо, я очень мало знаю о том, о чем сейчас спрашиваю, но вот суть:
Я хочу построить станок с ЧПУ из старых дисководов. Я купил пару ИС L293D с двойным Н-мостом для управления шаговыми двигателями, и я хочу взаимодействовать с grbl. Проблема, с которой я, кажется, сталкиваюсь при разработке правильной схемы для этого, заключается в том, что схемы для управления шаговыми двигателями с L293D включают два входа, по одному для каждого направления, а grbl, похоже, использует только один вывод Arduino для направления для каждой оси.
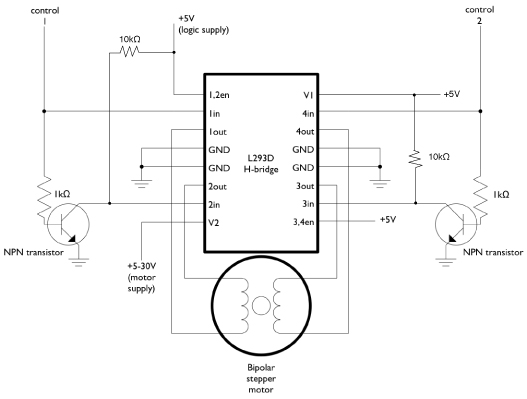
Итак, что я придумал, так это использование транзисторов pnp и npn, которые действуют как своего рода двухпозиционный переключатель, когда я подаю напряжение, один включается, другой выключается, и наоборот, так что в основном 1 и 0 управляют тем, что способ вращения двигателя, а «шаговый импульс» обеспечит фактическую мощность двигателя для его перемещения в этом направлении.
Мой вопрос: будет ли это работать, или то, что я сказал, полная ерунда? Я понимаю, что транзисторы pnp и npn представляют собой что-то вроде логического переключателя «обычно включено» или «обычно выключено», так что вот где я придумал это ... Что-то вроде того, как H-мост работает в первом место.
Спасибо, что нашли время, диаграммы, которые я смотрю, следующие:
grbl для контактов Arduino: http://www.electrodragon.com/w/images/e/e7/Grbl_Pin_Layout.png
L293D управляет шаговым двигателем: http://arduino.cc/en/uploads/Reference/bipolar_stepper_two_pins2.png
Я думаю, что вам действительно нужен расширитель ввода-вывода: http://www.digikey.com/product-detail/en/SX1505I087TRT/SX1505I087CT-ND/2272323
Это относительно простое цифровое устройство. Arduino будет связываться с расширителем ввода-вывода по некоторому стандартному протоколу связи (обычно I2C или SPI), а расширитель ввода-вывода шевелит контакты от имени контроллера.
Вместо того, чтобы использовать 12 контактов на Arduino для прямого управления мостами H, Arduino использует 2 контакта (в случае I2C) для связи с расширителем ввода-вывода, а расширитель ввода-вывода напрямую управляет контактами. Arduino скажет: «Хорошо, мистер IO Expander. Включите свой вывод 2 и выключите свой вывод 8», и расширитель ввода-вывода установит эти выводы соответствующим образом.
Я думаю, что вы используете не тот чип для управления шаговым двигателем. Стиль чипа драйвера, который вы должны использовать, уже имеет входы шага и направления и будет подключаться непосредственно к плате Arduino, на которой работает GRBL.
Хотя в настоящее время доступно МНОГО таких устройств, мне нравится DRV8825 от TI. Это хорошо для около 1,5 А на фазу с максимальным напряжением питания 45 В. Он имеет возможность уменьшить ток катушки до минимального значения, необходимого для вашего конкретного двигателя.
С этим чипом может быть сложно работать отдельно из-за узкого расстояния между выводами и нижней тепловой прокладки. Однако он доступен уже смонтированным на печатной плате со всеми дополнительными компонентами, необходимыми для его работы. Просто подключите плату к контроллеру, шаговому двигателю и напряжению питания, и все готово.
Одним из таких поставщиков является Pololu: DRV8825 , и они предлагают комплект из 5 модулей драйверов по сниженной цене.
Также проверьте Geckodrive для более крупных (но более дорогих) модулей драйверов.
{kind=link}
{kind=link}
Роланд Мислингер
эйашин
КертисHx